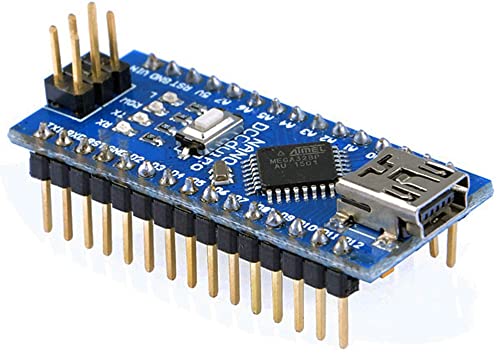
Arduino Nano
This was my first big project with Arduino after experimenting with the device and with various components for months. I decided to build a kart becuase I thought that it was a good first project with several different systems working together. Because it was my first project with a microcontroller, and because I was busy with classes, This project took a few years to arrive at a place I was happy with. The gear mesh in particular gave me much trouble because I was completely inexperienced with them and I was also working with cheap plastic gears from Ebay. I caused many shorts and destroyed many components during the process of constructing this kart, but I learned very important lessons with each failure.
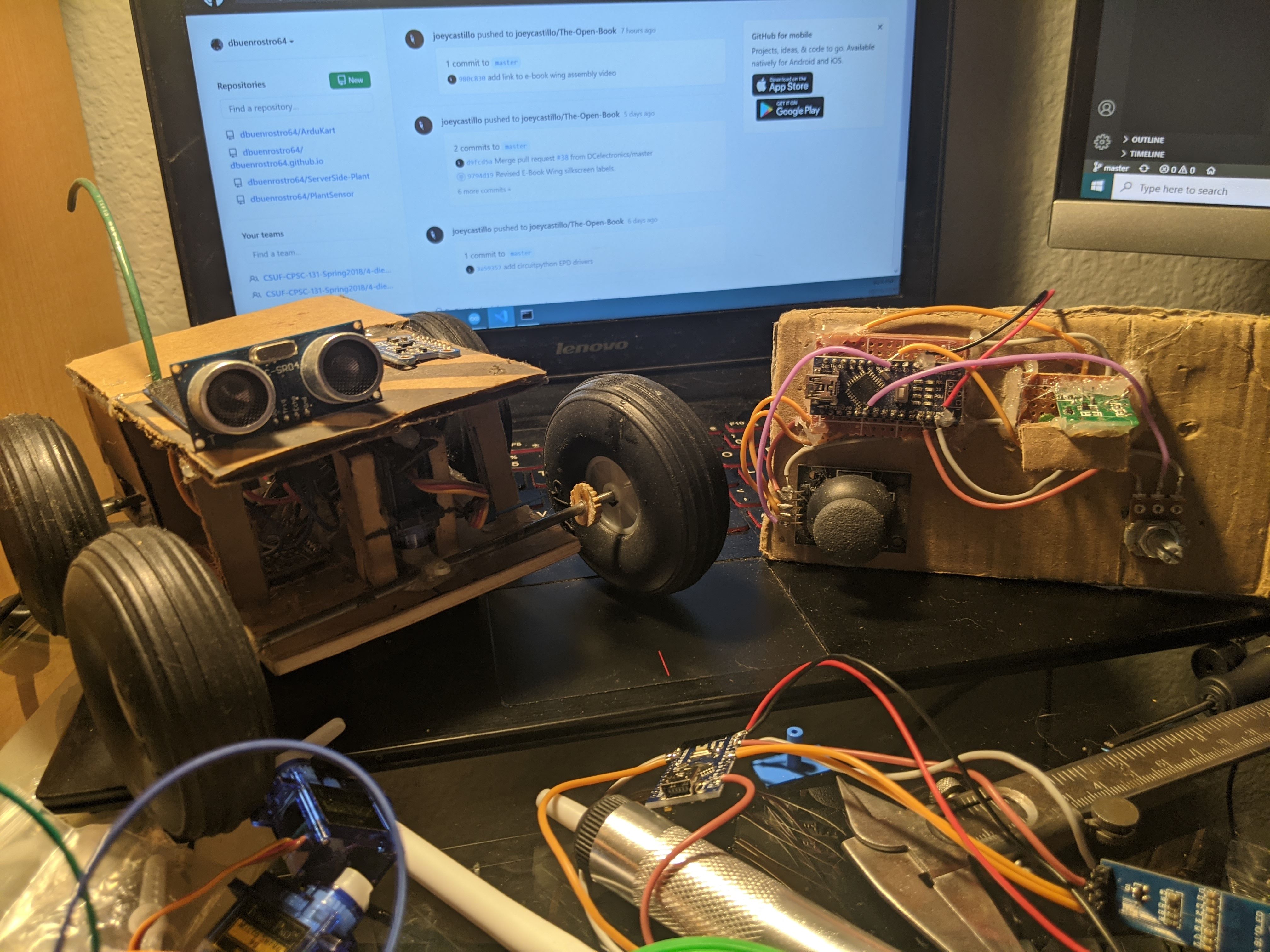
The design of this project is split up into two parts, the kart and the transmitter. The original concept for
the kart had a control stick wired to its Arduino, but I decided on the transmitter later for better ease of use.
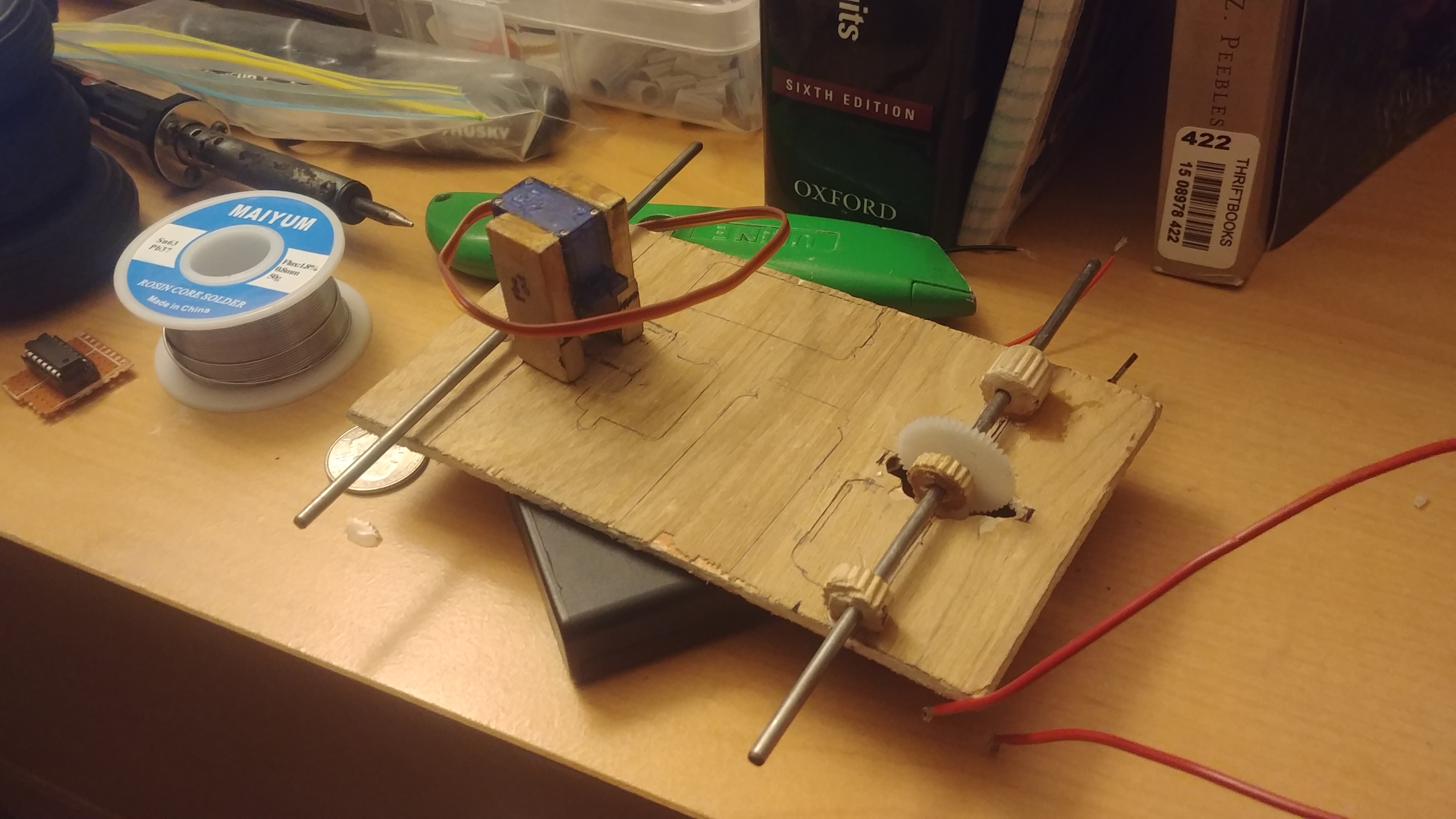
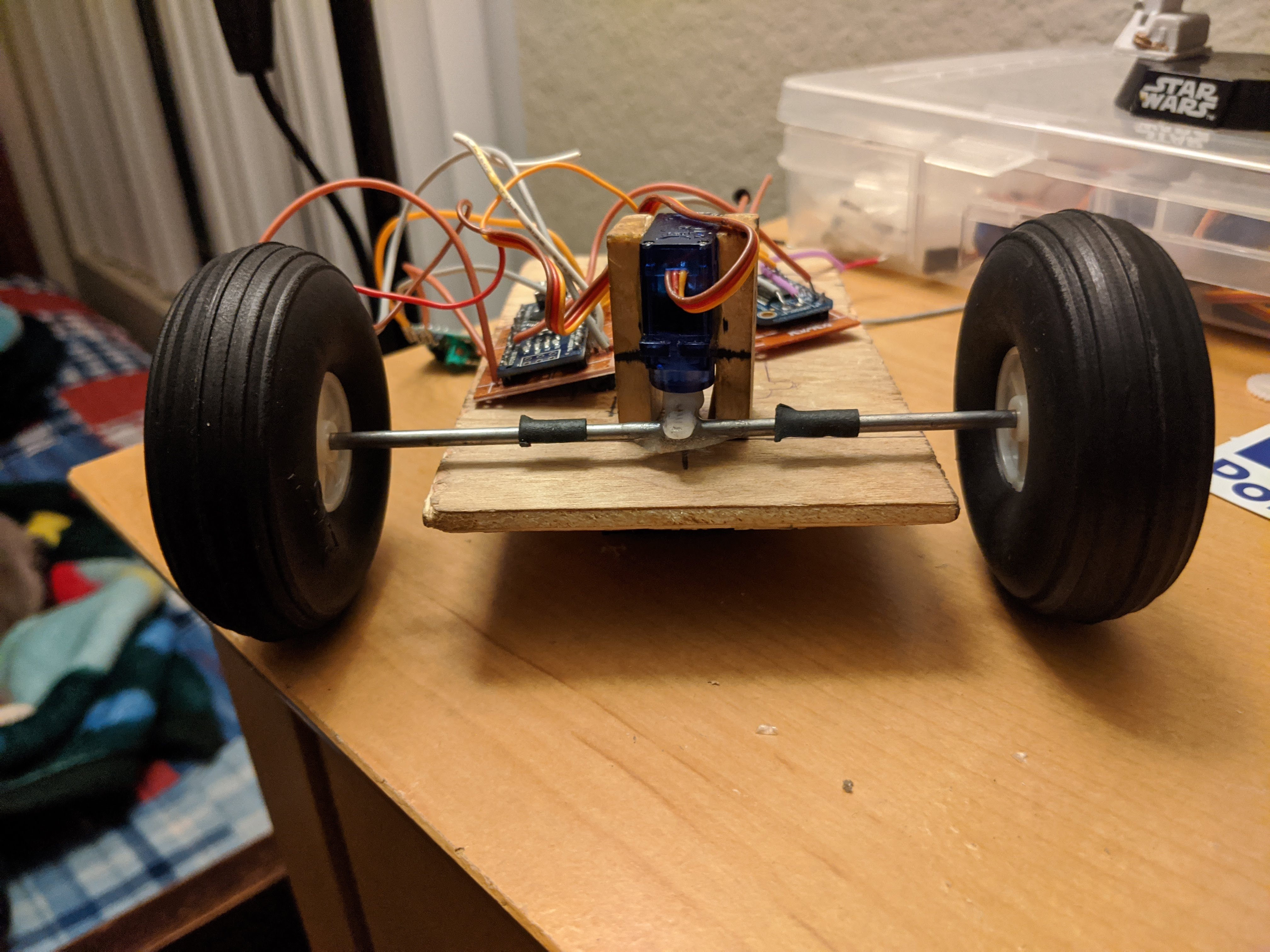
For the frame of the kart, I used a spare piece of plywood that I cut into shape at my job's workshop. The kart
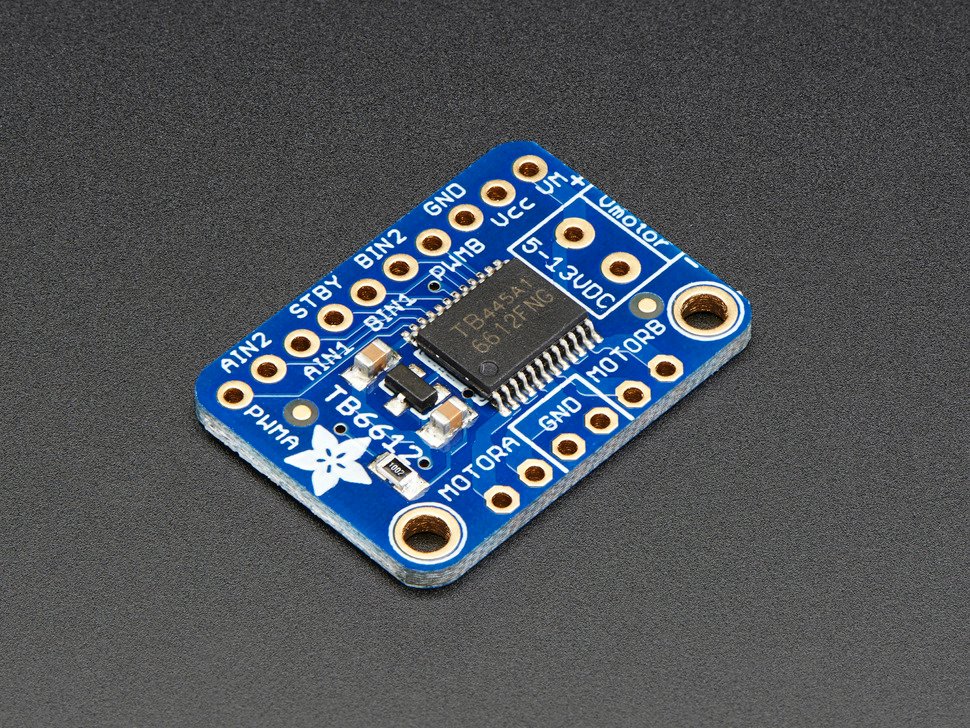
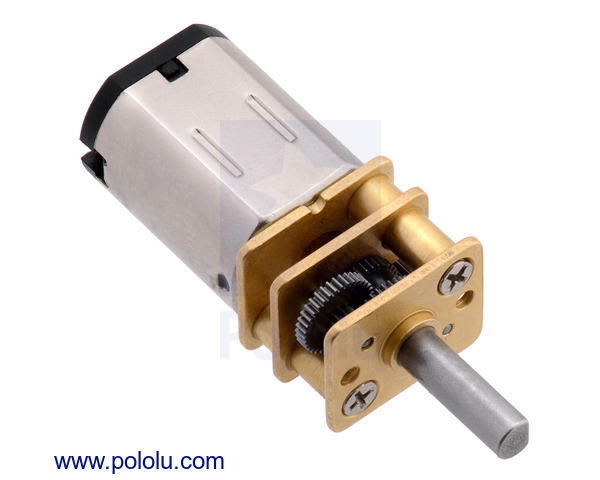
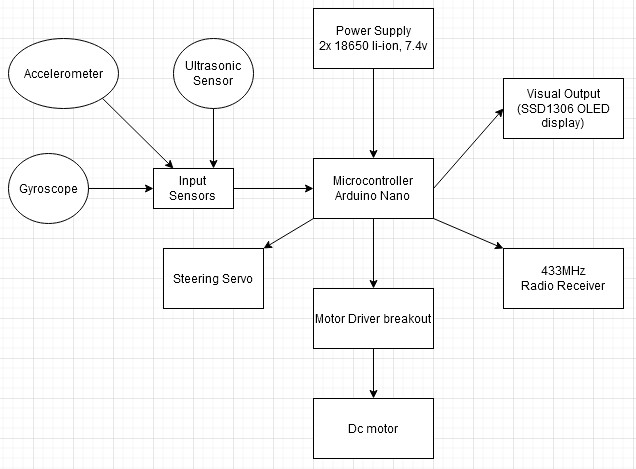
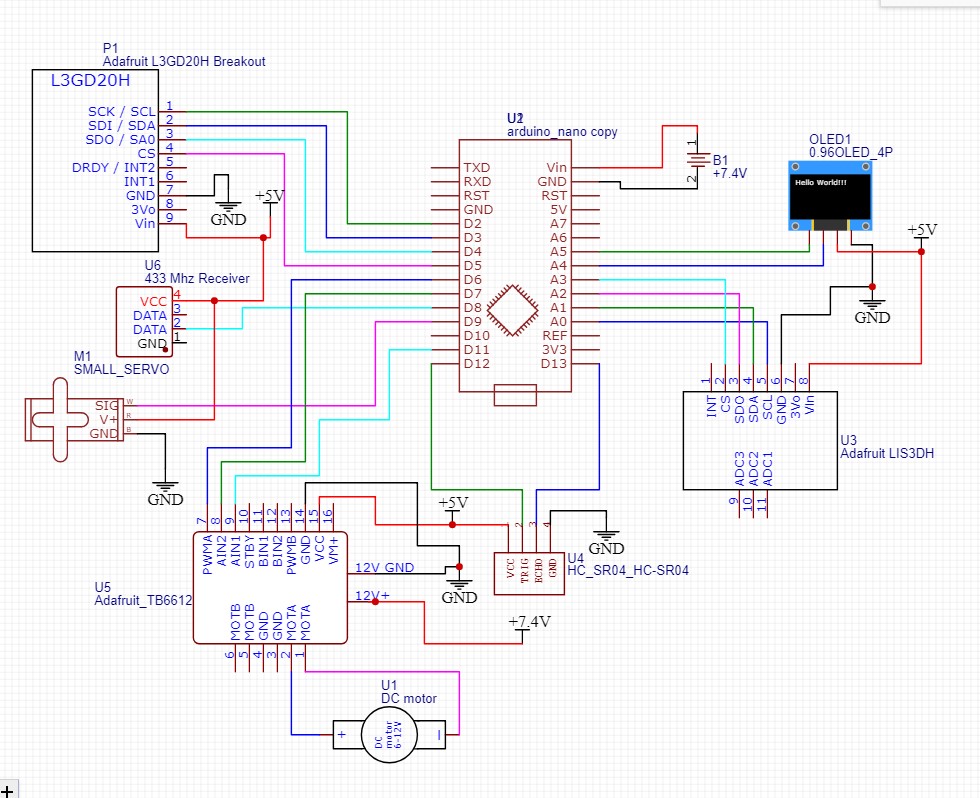
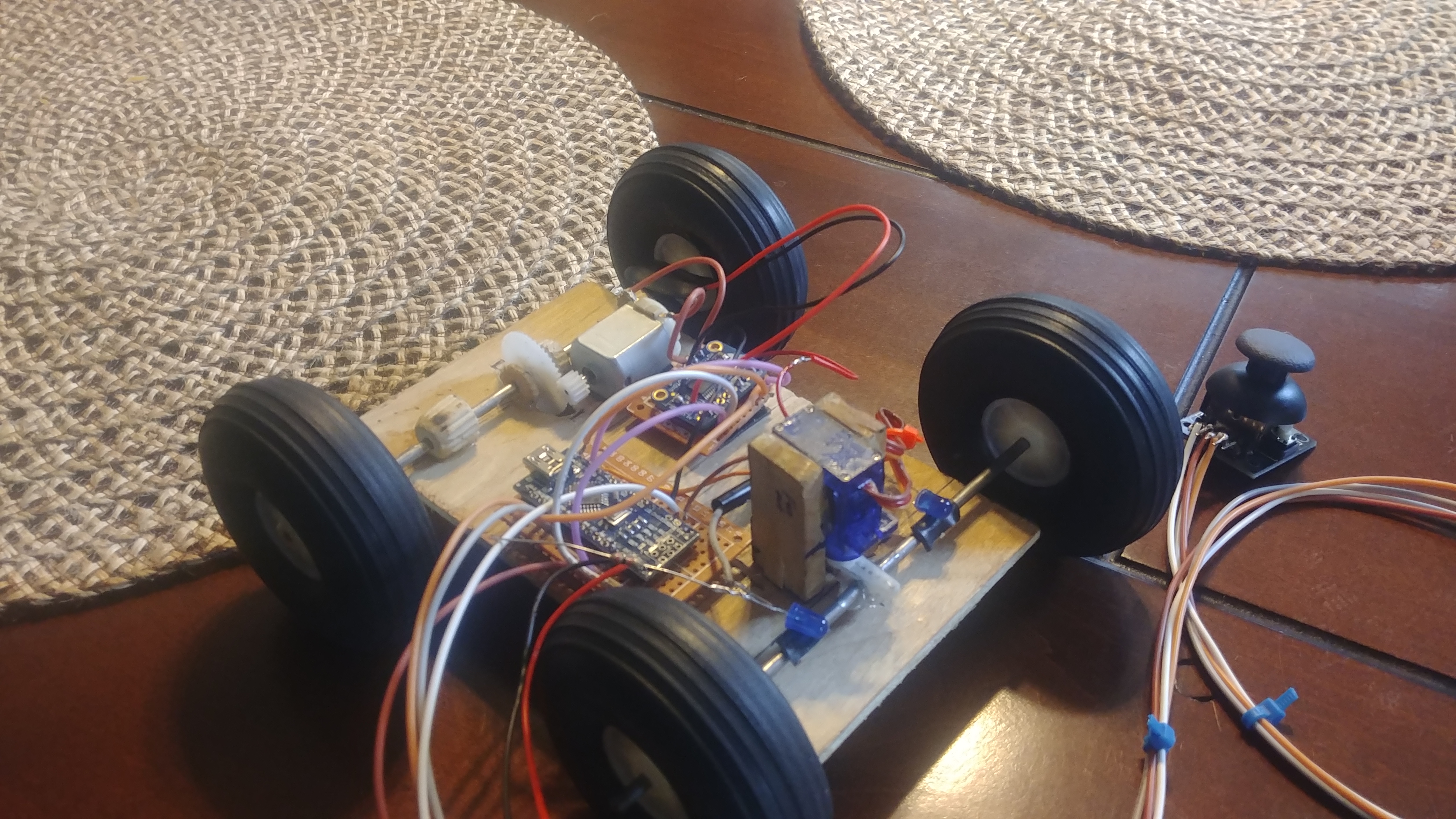
revolves around the Arduino which coordinates all systems. I used a motor driver breakout to drive the small
dc motor. This gives the motor the ability to change directions and adjust the speed through instructions from the
microcontroller. The steering is controlled by a servo motor attached to the front axle. Using the arduino's internal
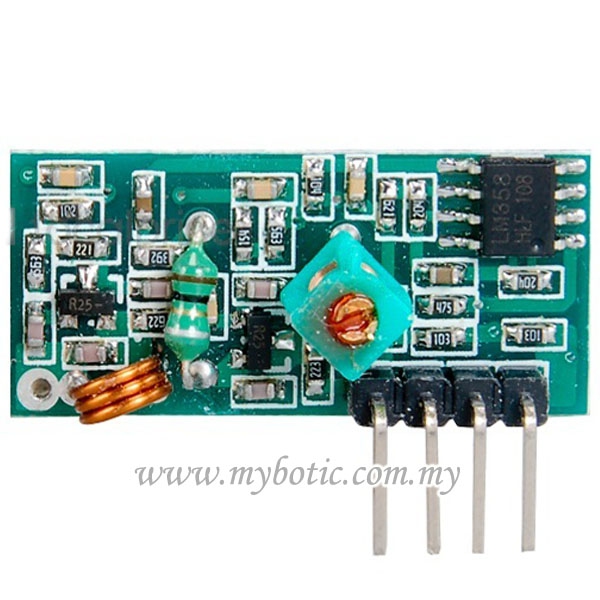
timers, these systems are able to work independently. The receiver will pick up instructions from the transmitter when
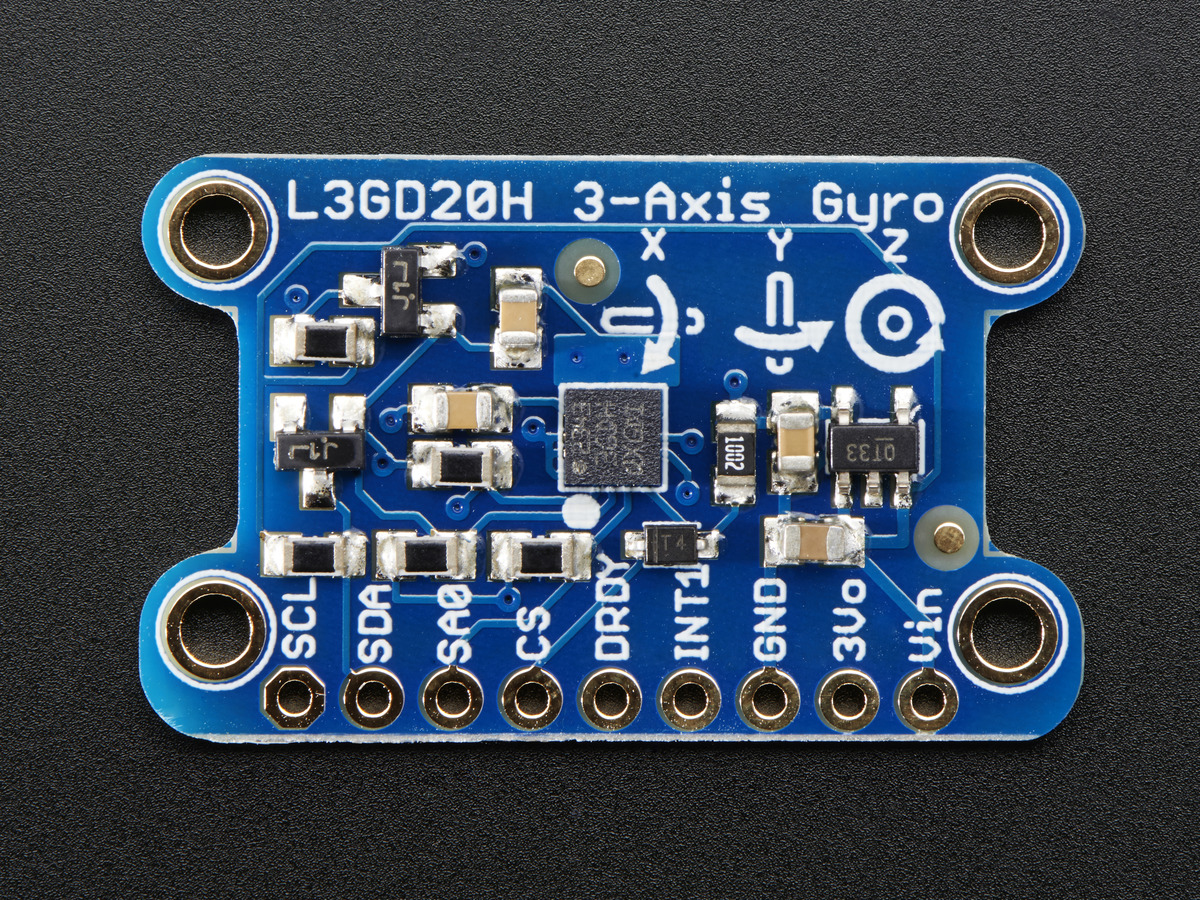
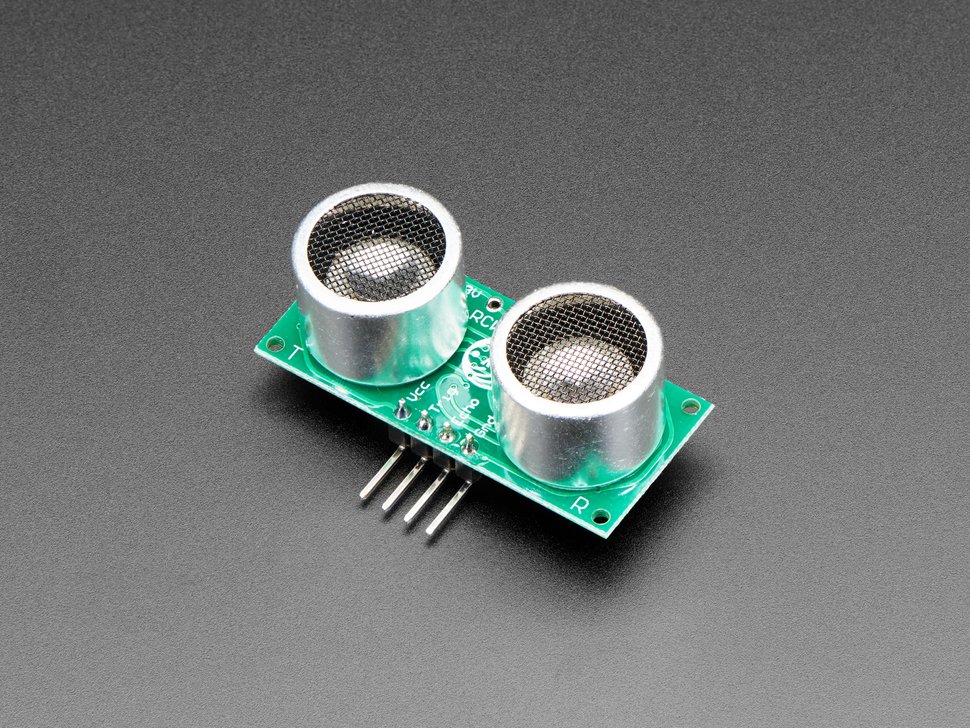
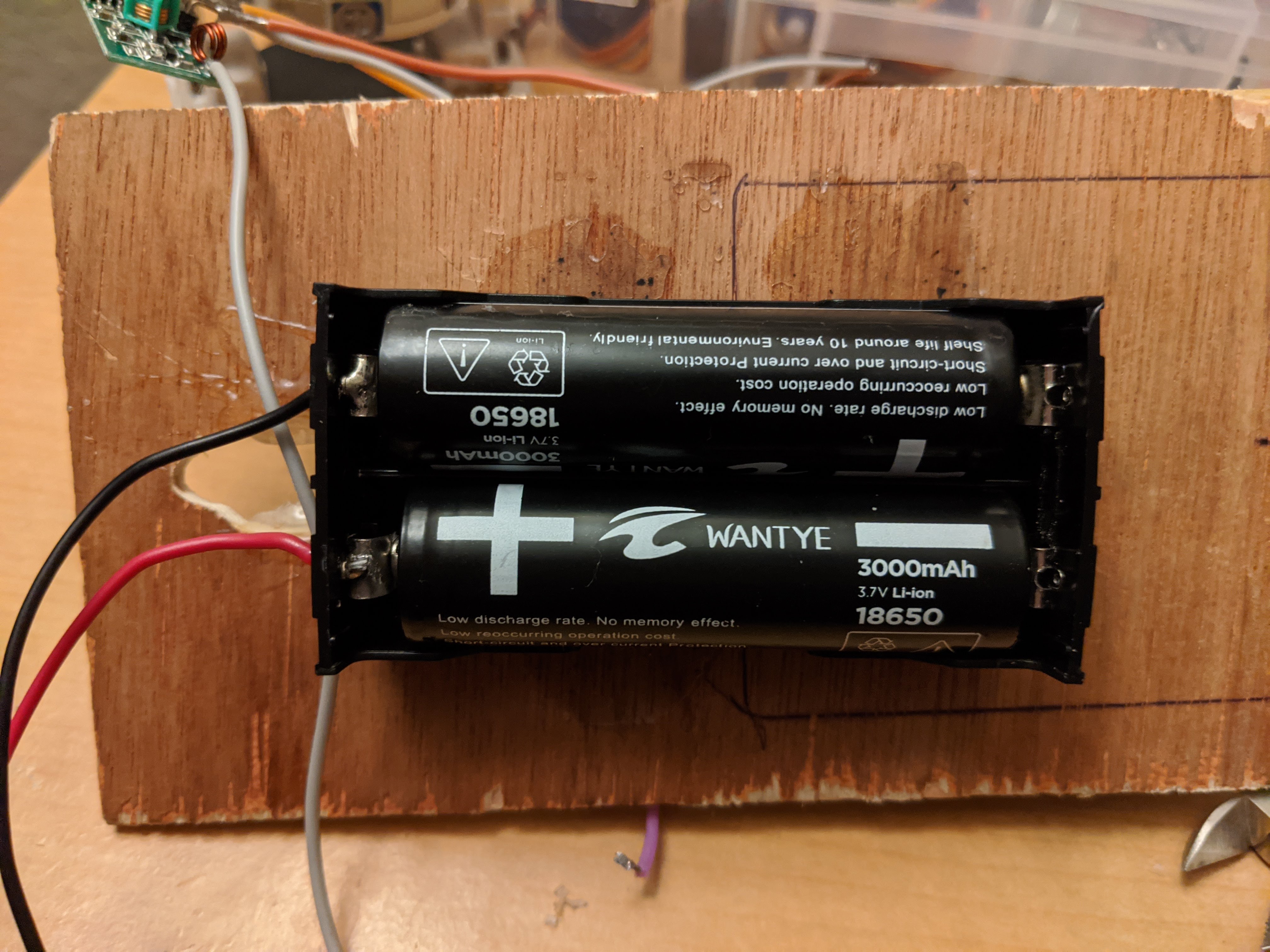
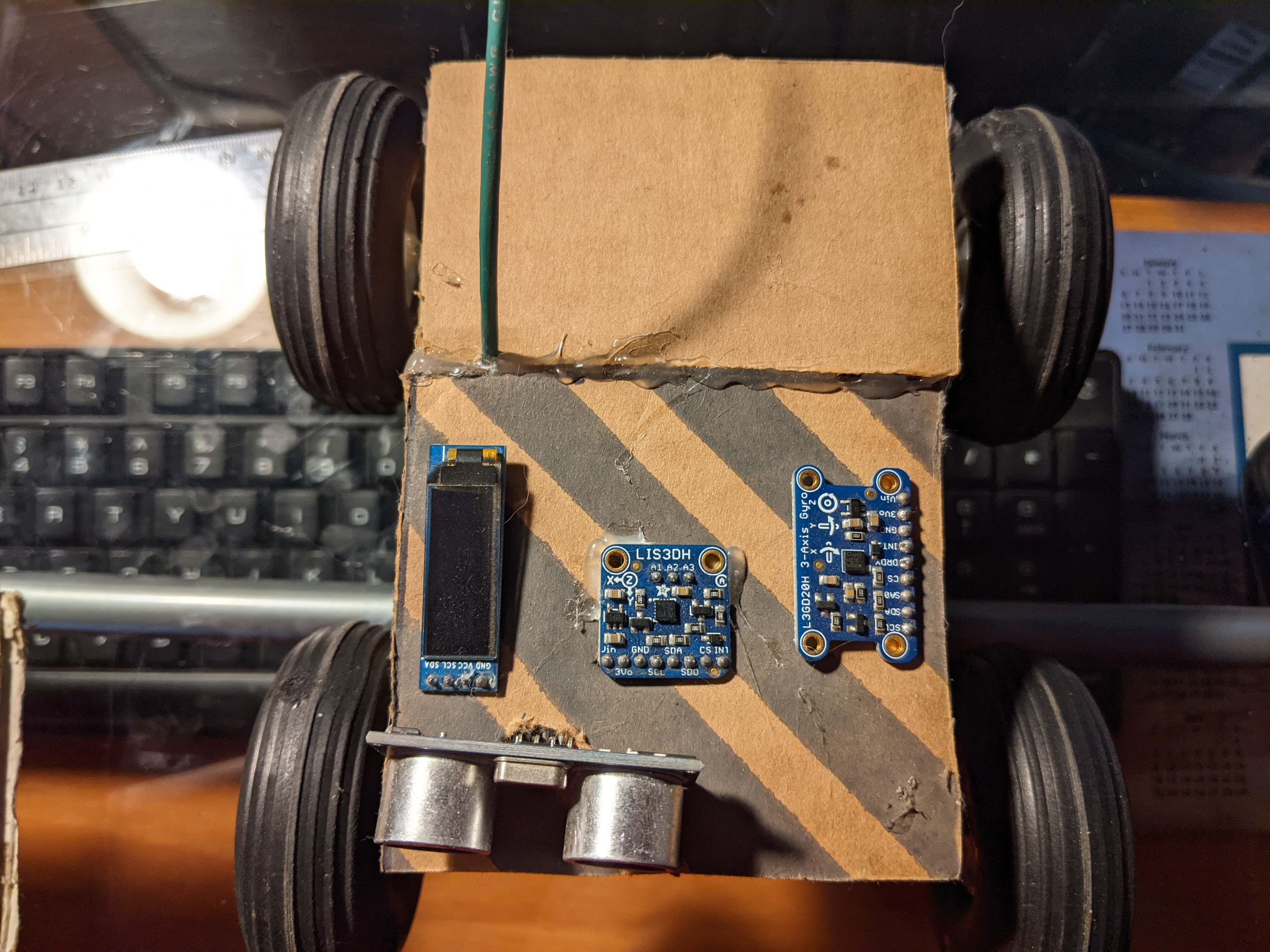
it is in RC mode. The kart is powered by two 18650 cells located under the plywood frame. Later on I added various sensors
to the top of the kart to write executable commands. The gyroscope and accelerometer allowed me to execute 90 degree
turns fairly accurately.
The transmitter is a simple device centered around the Arduino. It is basically a few input devices where their values are
stored in a struct in the Arduino. The Arduino then tells the Transmitter to send this struct to the Kart which will receive it
as long as it is in the right mode. The whole thing is powered by 4 AA batteries.







1 sec forward, 360 degree left, 1 sec forward
180 degree right, 1 sec forward, 90 degree left, 1 sec reverse
The kart can handle multiple inputs from the transmitter well. It can turn and go forwards at the same time thanks to the timer. The torque provided by the motor's gear box allows the kart to navigate small obstacles, but if they are too big, then the motor will stall.